STM32F405 FOC BLDC PMSM Naknada za razvoj серводвигателя AGV Mobilna kolica pokazivački uređaj robota
Shop: Instrumenti za mjerenje i analizu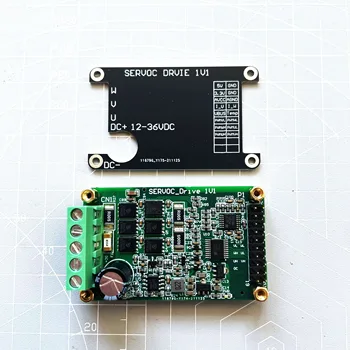






STM32F405 FOC BLDC PMSM Naknada za razvoj серводвигателя AGV Mobilna kolica pokazivački uređaj robota
Informacije o proizvodu
modname=ckeditoru
A: verzija A0-STM32F405
B: verzija B1-STM32F405 + motor 36ST79
C: Verzija B1-STM32F405 + motor 36ST79
STM32F405 FOC BLDC PMSM Naknada za razvoj серводвигателя AGV Mobilna kolica-manipulator robota
Naknada za razvoj pogona серводвигателя
1, na temelju glavnog odbora STM32F405RGT6
2, ulazni napon: 12 ~ 36 vdc
3, nazivna struja: 8A, vrhunac struja: 20A, ugrađen osigurač
4, sučelje upravljački signal: upravljački signal visoke i niske razine PWM signal struje faze U, W, napon signala sabirnice, senzora temperature ntc, napajanje 5 v za napajanje 3,3 (2,54 interval između redova kontakata 2x10p)
5. Priložite PDF-verziju principijelna shema
6, pogodan za pre-istraživačka evaluacija, sekundarni razvoj, učenje i druge prigode.
7. Naknada za upravljanje:
8, algoritam vektor upravljanja, biblioteka bez ST
jednostrani sučelje кодирующего komunikacijskih uređaja može biti prilagođen кодирующему uređaj apsolutne vrijednosti komunikacije u radionici
1 sučelje inkrementalni кодирующего uređaja ABZ signal razine TTL
Jedan komunikacijski port 485 za primanje naredbi za upravljanje
Jedan komunikacijski port CAN za primanje naredbi za upravljanje
Sučelje za ispravljanje pogrešaka Lead SWD, pogodan za ispravljanje pogrešaka u razvoj programa
Jednokanalni UART serijski port TTL se koristi za povezivanje na gornji računalom
Sučelje SPI s jednim kanalom i četiri linije, pogodan za praćenje razvoja i nadogradnje
Priložite PDF-verziju sheme i odgovarajući izvorni kôd programa
Frekvencija PWM iznosi 16 khz frekvencija za upravljanje kruga struje iznosi 16 khz, 8 khz za verziju G070) učestalost kontrole konture brzina iznosi 4 khz, a frekvencija za upravljanje kruga položaja jednaka 1 khz.
Izvorni kod podržava program: (razvojno okruženje keil MDK5.25 i iznad verzija, biblioteka, odlična od ST, temelji se na razvoju knjižnice HAL, upravljanje motorom je dio njihove vlastite implementacije, jasne strukture, lako može sekundarne razvoju)
1, vektorskog upravljanja s разомкнутым kruga: nema potrebe za povezivanje signala hall, trebate samo spojiti zvučnike motora U, V, W, može se postići niske brzine 0 ~ 500 o/min (Nedostatak: grijanje vrijednost sposobnost motora je relativno velika)
2. Sa servo kontrola brzine zatvorene konture: to bi trebalo da se prilagode одноконтурному motor s apsolutnom энкодером магазинного vrste komunikacije (36ST79, 57ST50), koji može razviti brzinu od 0-3000 o/ min (određena maksimalna brzina ovisi o karakteristikama motora i napajanja), bez nedostataka upravljanje s разомкнутым konture, PID-brzina zatvorene konture, automatski podešava struja u skladu s veličinom opterećenja.
3. Sa servo kontrola direktivom zatvorene konture: potrebno privikavanje na одноконтурному motor apsolutnim enkoderom цехового vrste komunikacije (36ST79, 57ST50), koji se može provesti precizno upravljanje direktivom (razlučivost enkoderom + / -1), brzinom PID i direktivom zatvorene konture, kao i automatsko podešavanje struje u skladu s veličinom opterećenja.
Fizički prikaz:
36ST79:
: 24
: 20 W
: 2000 o/min
: 0,1 Nm
57ST50:
: 24
: 50 W
: 3000 o/min
: 0,2 Nm
- Pribor za diy - ELEKTROTEHNIKA
- Podrijetlo - Kontinentalna Kina




























